Autonomous Underwater Vehicle


To the Moon
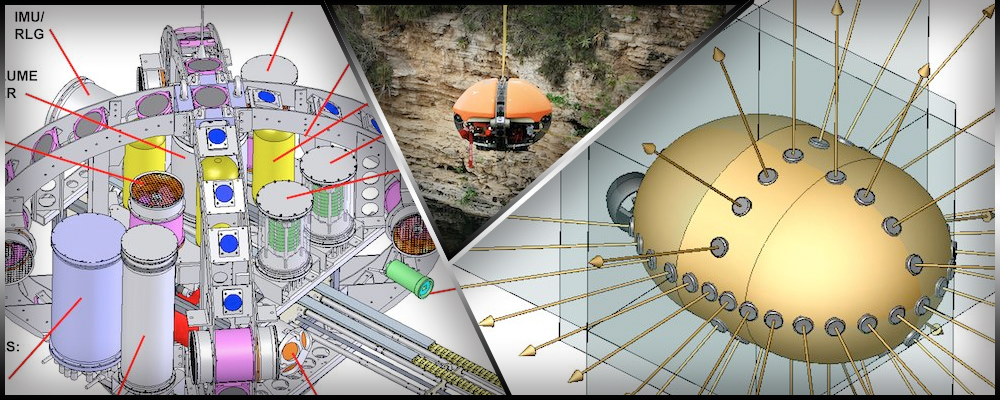
As part of NASA’s planetary robotics program, Stone Aerospace was selected by NASA to develop an autonomous underwater robot capable of mapping its environment on the fly and using this map to return home. This was considered to be a critical step with the ultimate aim of exploring the sub-surface ocean of Europa, one of the moons of Jupiter. While many of the technical problems were to be taken on by universities, Stone Aerospace needed a trusted partner that not only could take on the design of key components of the robot, but could also assess whether the other contractors were developing robust technical solutions in a timely manner.
DepthX Circuit Boards
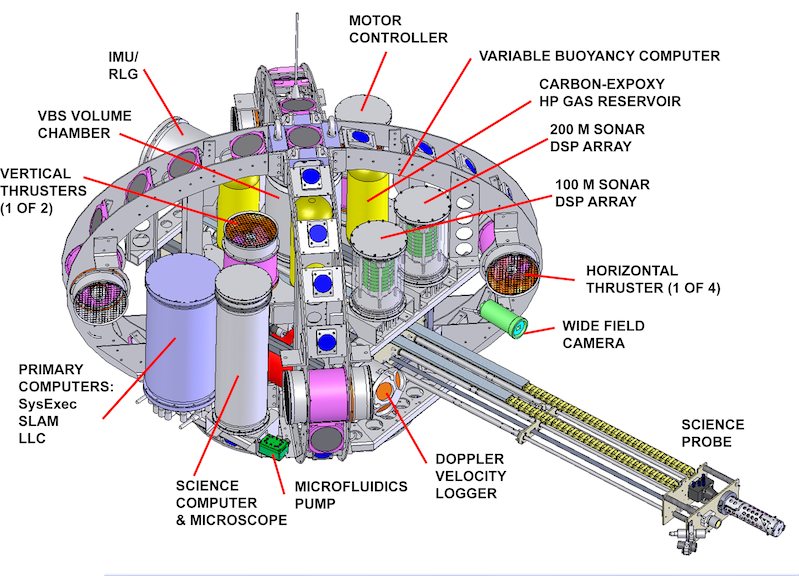
RMB designed multiple printed circuit boards for use in the DepthX vehicle and made significant contributions to the power storage and distribution systems. Through periodic meetings and reviews RMB helped keep the project on track–particularly when another vendor’s system failed at low temperatures during a critical trial.
Where No Man Has Gone Before
The DepthX vehicle was successfully deployed in Northern Mexico in May 2007 and was used to autonomously explore hitherto unexplored cenotes. As a result of these successful trials, Stone Aerospace has received further contracts to develop the technology—and RMB is continuing to ensure the future success.